Самодельный контроллер шагового двигателя. Драйверы от TI: Управляй любым электродвигателем
Краткое введение в теорию и типы драйверов, советы по подбору оптимального драйвера для шагового двигателя.
Если вы хотите купить драйвер шагового двигателя , нажмите на информер справа
Некоторые сведения, которые могут помочь вам выбрать драйвер шагового двигателя
.
Шаговый двигатель – двигатель со сложной схемой управления, которому требуется специальное электронное устройство – драйвер шагового двигателя. Драйвер шагового двигателя получает на входе логические сигналы STEP/DIR, которые, как правило, представлены высоким и низким уровнем опорного напряжения 5 В, и в соответствии с полученными сигналами изменяет ток в обмотках двигателя, заставляя вал поворачиваться в соответствующем направлении на заданный угол. >Сигналы STEP/DIR генерируются ЧПУ-контроллером или персональным компьютером, на котором работает программа управления типа Mach3 или LinuxCNC.
Задача драйвера – изменять ток в обмотках как можно более эффективно, а поскольку индуктивность обмоток и ротор гибридного шагового двигателя постоянно вмешиваются в этот процесс, то драйверы весьма отличаются друг от друга своими характеристиками и качеством получаемого движения. Ток, протекающий в обмотках, определяет движение ротора: величина тока задает крутящий момент, его динамика влияет на равномерность и т.п.
Типы (виды) драйверов ШД
Драйверы делятся по способу закачки тока в обмотки на несколько видов:
1) Драйверы постоянного напряжения
Эти драйверы подают постоянный уровень напряжения поочередно на обмотки, результирующий ток зависит от сопротивления обмотки, а на высоких скоростях – и от индуктивности. Эти драйверы крайне неэффективны, и могут быть использованы только на очень малых скоростях.
2) Двухуровневые драйверы
В драйверах этого типа ток в обмотке сперва поднимается до нужного уровня с помощью высокого напряжения, затем источник высокого напряжения отключается, и нужная сила тока поддерживается источником малого напряжения. Такие драйверы достаточно эффективны, помимо прочего они снижают нагрев двигателей, и их все еще можно иногда встретить в высококлассном оборудовании. Однако, такие драйверы поддерживают только режим шага и полушага.
3) Драйверы с ШИМ.
На текущий момент ШИМ-драйверы шаговых двигателей наиболее популярны, практически все драйверы на рынке – этого типа. Эти драйверы подают на обмотку шагового мотора ШИМ-сигнал очень высокого напряжения, которое отсекается по достижению током необходимого уровня. Величина силы тока, по которой происходит отсечка, задается либо потенциометром, либо DIP-переключателем, иногда эта величина программируется с помощью специального ПО. Эти драйверы достаточно интеллектуальны, и снабжены множеством дополнительных функций, поддерживают разные деления шага, что позволяет увеличить дискретность позиционирования и плавность хода. Однако, ШИМ-драйверы также весьма сильно отличаются друг от друга. Помимо таких характеристик, как питающее напряжение и максимальный ток обмотки, у них отличается частота ШИМ. Лучше, если частота драйвера будет более 20 кГц, и вообще, чем она больше – тем лучше. Частота ниже 20 кГц ухудшает ходовые характеристики двигателей и попадает в слышимый диапазон, шаговые моторы начинают издавать неприятный писк. Драйверы шаговых двигателей вслед за самими двигателями делятся на униполярные и биполярные. Начинающим станкостроителям настоятельно рекомендуем не экспериментировать с приводами, а выбрать те, по которым можно получить максимальный объем технической поддержки, информации и для которых продукты на рынке представлены наиболее широко. Такими являются драйверы биполярных гибридных шаговых двигателей.
Как выбрать драйвер шагового двигателя (ШД)
Первый параметр , на который стоит обратить внимание, когда вы решили выбрать драйвер шагового двигателя – это сила тока, которую может обеспечить драйвер. Как правило, она регулируется в достаточно широких пределах, но стоит драйвер нужно выбирать такой, который может выдавать ток, равный току фазы выбранного шагового двигателя. Желательно, конечно, чтобы максимальная сила тока драйвера была еще на 15-40% больше. С одной стороны, это даст запас на случай, если вы захотите получить больший момент от мотора, или в будущем поставите более мощный двигатель, с другой – не будет излишней: производители иногда «подгоняют» номиналы радиоэлектронных компонентов к тому или иному виду/размеру двигателей, поэтому слишком мощный драйвер на 8 А, управляющий двигателем NEMA 17 (42 мм), может, к примеру, вызывать излишние вибрации.
Второй момент – это напряжение питания. Весьма важный и неоднозначный параметр. Его влияние достаточно многогранно – напряжение питания влияет на динамику(момент на высоких оборотах), вибрации, нагрев двигателя и драйвера. Обычно максимальное напряжение питания драйвера примерно равно максимальному току I, умноженному на 8-10. Если максимальное указанное напряжение питания драйвера резко отличается от данных величин – стоит дополнительно поинтересоваться, в чем причина такой разницы. Чем больше индуктивность двигателя - тем большее напряжение требуется для драйвера. Существует эмпирическая формула U = 32 * sqrt(L), где L - индуктивность обмотки шагового двигателя. Величина U, получаемая по этой формуле, весьма приблизительная, но она позволяет ориентироваться при выборе драйвера: U должно примерно равняться максимальному значению напряжения питания драйвера. Если вы получили U равным 70, то по данному критерию проходят драйверы EM706, AM882, YKC2608M-H.
Третий аспект – наличие опторазвязанных входов. Практически во всех драйверах и контроллерах, выпускаемых на заводах, тем более брендовых, опторазвязка стоит обязательно, ведь драйвер – устройство силовой электроники, и пробой ключа может привести к мощному импульсу на кабелях, по которым подаются управляющие сигналы, и выгоранию дорогостоящего ЧПУ-контроллера. Однако, если вы решили выбрать драйвер ШД незнакомой модели, стоит дополнительно поинтересоваться наличием оптоизоляции входов и выходов.
Четвертый аспект – наличие механизмов подавления резонанса. Резонанс шагового двигателя – явление, которое проявляется всегда, разница только в резонансной частоте, которая прежде всего зависит от момента инерции нагрузки, напряжения питания драйвера и установленной силы тока фазы мотора. При возникновении резонанса шаговый двигатель начинает вибрировать и терять крутящий момент, вплоть до полной остановки вала. Для подавления резонанса используется микрошаг и – встроенные алгоритмы компенсации резонанса. Колеблющийся в резонансе ротор шагового двигателя порождает микроколебания ЭДС индукции в обмотках, и по их характеру и амплитуде драйвер определяет, есть ли резонанс и насколько он силен. В зависимости от полученных данных драйвер несколько смещает шаги двигателя во времени относительно друг друга – такая искусственная неравномерность нивелирует резонанс. Механизм подавления резонанса встроен во все >драйверы Leadshine серий DM, AM и EM. Драйверы с подавлением резонанса – высококачественные драйверы, и если бюджет позволяет – лучше брать именно такие. Впрочем, и без этого механизма драйвер остается вполне рабочим устройством – основная масса проданных драйверов – без компенсации резонанса, и тем не менее десятки тысяч станков без проблем работают по всему миру и успешно выполняют свои задачи.
Пятый аспект – протокольная часть. Надо убедиться, что драйвер работает по нужному вам протоколу, а уровни входных сигналов совместимы с требуемыми Вам логическими уровнями. Эта проверка идет пятым пунктом, потому что за редким исключением подавляющее число драйверов работает по протоколу STEP/DIR/ENABLE и совместимо с уровнем сигналов 0..5 В, вам надо только лишь на всякий случай убедиться.
Шестой аспект – наличие защитных функций. Среди них защита от превышения питающего напряжения, тока обмоток(в т.ч. от короткого замыкания обмоток), от переполюсовки питающего напряжения, от неправильного подключения фаз шагового мотора. Чем больше таких функций - тем лучше.
Седьмой аспект – наличие микрошаговых режимов. Сейчас практически в каждом драйвере есть множество микрошаговых режимов. Однако, из каждого правила есть исключения, и в драйверах Geckodrive режим только один – деления шага 1/10. Мотивируется это тем, что большее деление не приносит большей точности, а значит, в нем нет необходимости. Однако, практика показывает, что микрошаг полезен вовсе не повышением дискретности позиционирования или точности, а тем, что чем больше деление шага, тем плавней движение вала мотора и меньше резонанс. Соответственно, при прочих равных условиях стоит использовать деление чем больше, тем лучше. Максимально допустимое деление шага будет определяться не только встроенными в драйвер таблицами Брадиса, но и максимальной частотой входных сигналов – так, для драйвера со входной частотой 100 кГц нет смысла использовать деление 1/256, так как скорость вращения будет ограничена 100 000 / (200 * 256) * 60 = 117 об/мин, что для шагового двигателя очень мало. Кроме того, персональный компьютер тоже с трудом сможет генерировать сигналы с частотой более 100 кГц. Если вы не планируете использовать аппаратный ЧПУ контроллер, то 100 кГц скорее всего будет Вашим потолком, что соответствует делению 1/32.
Восьмой аспект – наличие дополнительных функций. Их может быть множество, например, функция определения «срыва» - внезапной остановки вала при заклинивании или нехватки крутящего момента у шагового двигателя, выходы для внешней индикации ошибок и т.п. Все они не являются необходимыми, но могут сильно облегчить жизнь при построении станка.
Девятый, и самый важный аспект – качество драйвера. Оно практически не связано с характеристиками и т.п. На рынке существует множество предложений, и иногда характеристики драйверов двух производителей совпадают практически до запятой, а установив их по очереди на станок, становится ясно, что один из производителей явно занимается не своим делом, и в производстве недорогих утюгов ему больше повезет. Определить уровень драйвера заранее по каким-то косвенным данным новичку достаточно трудно. Можно попробовать ориентироваться на количество интеллектуальных функций, таких как «stall detect» или подавление резонанса, а также воспользоваться проверенным способом - ориентироваться на бренды.
![]() В ассортименте полупроводниковых компонентов производства компании Texas Instruments
широко представлены микросхемы драйверов для управления всеми типами электродвигателей
, которые, совершенствуясь, находят все более широкое применение в самом различном оборудовании. Компания предлагает решения для создания приводов, работающих в широком диапазоне токов и напряжений, обеспечивающих надежную и удобную эксплуатацию коллекторных
, бесколлекторных
и шаговых двигателей
с полным комплексом защит по току, напряжению и температуре.
В ассортименте полупроводниковых компонентов производства компании Texas Instruments
широко представлены микросхемы драйверов для управления всеми типами электродвигателей
, которые, совершенствуясь, находят все более широкое применение в самом различном оборудовании. Компания предлагает решения для создания приводов, работающих в широком диапазоне токов и напряжений, обеспечивающих надежную и удобную эксплуатацию коллекторных
, бесколлекторных
и шаговых двигателей
с полным комплексом защит по току, напряжению и температуре.
Электродвигатели находят широчайшее применение в современном высокотехнологическом укладе жизни. Этот тип электромеханического привода по-прежнему является одним из наиболее распространенных и востребованных. Электродвигатели самого разного назначения являются одной из основных составляющих любого производства, повсеместно используются в офисной и домашней технике, в системах мониторинга и управления зданий и объектов. Очень широкое распространение электродвигатели нашли на современном транспорте. Еще более впечатляющее будущее уготовано электродвигателям в электромобилях и роботах.
С развитием технологий традиционные двигатели совершенствуются и находят все новые области применения. Современные высокоточные станки и робототехника немыслимы без электродвигателей с интеллектуальными системами управления. На земле, в воздухе и под водой электродвигатели остаются широко востребованным преобразователем электрической энергии в механическую.
Типы электродвигателей, способы управления и возникающие сложности
Впервые созданный в 1834 году русским ученым Якоби преобразователь электрической энергии во вращательное движение получил название электродвигатель. С тех пор он был серьезно усовершенствован – появилось множество новых вариантов, но использованные при его создании принципы электромагнетизма по-прежнему являются основой всех модификаций современных электродвигателей.
Проводник с проходящим по нему током (рисунок 1) создает вокруг себя магнитное поле, интенсивность (магнитная индукция) которого пропорциональна количеству витков, в случае использования катушки (N), и величине проходящего по ней тока (I), где, В – вектор магнитной индукции, К – магнитная постоянная, N – число витков, I – сила тока.

Изменение направления тока влияет и на направление магнитного поля проводника.
При этом на помещенный во внешнее магнитное поле проводник с током действует сила Лоренца, вызывающая его вращательное перемещение. Направление вращения легко определяется с помощью известного правила правой руки для проводника с током в магнитном поле (рисунок 2). Сила (F), действующая на проводник в магнитном поле, равна произведению силы тока (I) в проводнике на вектор магнитной индукции поля (B) и длину проводника (L). F = LIB.

Коллекторные двигатели
Коллекторные двигатели постоянного тока (Brushed DC или BDC, по терминологии TI) сегодня относятся к одним из наиболее распространенных механизмов электромагнитного вращения.
В магнитном поле собранного из постоянных магнитов статора вращается многосекционный ротор с катушками, которые попарно и попеременно подключаются через коммутируемые коллекторные ламели на оси ротора (рисунок 3). Выбор пары активируемых катушек выполняется на основании закона Лоренца в соответствии с правилом Буравчика. Источник тока всегда подключен к катушкам, силовые линии магнитного поля которых смещены на угол, близкий к 90°, относительно магнитного поля статора.

Электродвигатели подобного типа часто используют статор с постоянными магнитами. Они позволяют легко регулировать скорость вращения и отличаются невысокой стоимостью.
Также широко используется вариант 2-обмоточного электродвигателя подобного типа, но со статорной обмоткой вместо постоянного магнита. Такие модели обладают большим пусковым моментом и могут работать не только на постоянном, но и на переменном токе. Электродвигатели подобного типа почти повсеместно используются в различной бытовой технике.
К недостаткам этой конструкции BDC стоит отнести износ щеточно-коллекторного узла в процессе эксплуатации. Кроме того, из-за искрообразования при коммутации отдельных обмоток ротора отмечается повышенный уровень электромагнитных помех, что не позволяет использовать такие двигатели во взрывоопасных средах.
Особенностью двигателей BDC также является повышенный нагрев ротора, охлаждение которого затруднено в силу конструктивных особенностей двигателя.
Достоинства коллекторных двигателей:
- малая стоимость;
- простая система управления;
- 2-обмоточные коллекторные двигатели, обладающие высоким крутящим моментом и способные работать на постоянном и переменном токе.
Особенности эксплуатации коллекторных двигателей:
- щетки требуют периодического обслуживания, понижают надежность двигателя;
- в процессе коммутации возникают электрические искры и электромагнитные помехи;
- затруднен отвод тепла от перегревающегося ротора.
Бесколлекторные двигатели
Несколько менее распространенными среди двигателей постоянного тока являются модели с бесщеточной конструкцией (BrushLess DC или BLDC), использующие ротор с постоянными магнитами, которые вращаются между электромагнитами статора (рисунок 4). Коммутация тока здесь выполняется электронным способом. Переключение обмоток электромагнитов статора заставляет магнитное поле ротора следовать за его полем.
Текущее положение ротора обычно контролируется энкодерами или датчиком на основе эффекта Холла, либо применяется технология с измерением напряжения противо-ЭДС на обмотках без использования в этом случае отдельного датчика положения ротора (SensorLess).
Коммутация тока обмоток статора выполняется с помощью электронных ключей (вентилей). Именно поэтому бесколлекторные двигатели BLDC часто называют «вентильными». Очередность подключения пары обмоток двигателя происходит в зависимости от текущего положения ротора.
Принцип работы BLDC основан на том, что контроллер коммутирует обмотки статора так, чтобы вектор магнитного поля статора всегда был сдвинут на угол, близкий к 90° или -90° относительно вектора магнитного поля ротора. Вращающееся при переключении магнитное поле заставляет перемещаться вслед за ним ротор с постоянными магнитами.
При использовании трехфазного сигнала управления подключенными к источнику тока всегда оказываются только две пары обмоток, а одна – отключена. В результате последовательно используется комбинация из шести состояний (рисунок 5).

Электродвигатели без датчиков положения ротора отличаются повышенной технологичностью процесса изготовления и более низкой стоимостью. Подобная конструкция упрощает герметизацию внешних подключаемых выводов.
В качестве датчиков скорости и положения ротора в BLDC могут использоваться датчики Холла, которые отличаются небольшой стоимостью, но также и достаточно невысоким разрешением. Повышенное разрешение обеспечивают вращающиеся трансформаторы (резольверы). Они отличаются высокой стоимостью и требуют использования ЦАП, так как выходной сигнал у них синусоидальный. Высоким разрешением, но пониженной надежностью, обладают оптические датчики. На рисунке 6 представлены выходные сигналы датчиков разного типа при вращении ротора двигателя.

Преимущества двигателей BLDC:
- высокая эффективность;
- отсутствие щеток, обеспечивающее повышенную надежность, снижение затраты на обслуживание;
- линейность тока/крутящего момента;
- упрощенный отвод тепла.
Особенности применения двигателей BLDC:
- более сложная система управления с обратной связью по положению ротора;
- пульсации крутящего момента.
Шаговые двигатели
Шаговые двигатели (ШД) получили достаточно широкое распространение в системах автоматики и управления. Они являются еще одним типом бесколлекторных двигателей постоянного тока. Конструктивно ШД состоят из статора, на котором размещены обмотки возбуждения, и ротора, выполненного из магнитных материалов. Шаговые двигатели с магнитным ротором позволяют обеспечить больший крутящий момент и жесткую фиксацию ротора при обесточенных обмотках.
В процессе вращения ротор ШД перемещается шагами под управлением подаваемых на обмотки статора импульсов питания. Шаговые двигатели удобны для использования в приводах машин и механизмов, работающих в старт-стопном режиме. Их диапазон перемещения задается определенной последовательностью электрических импульсов. Такие двигатели отличаются высокой точностью, не требуют датчиков и цепей обратной связи. Угол поворота ротора зависит от количества поданных импульсов управления. Точность позиционирования (величина шага) зависит от конструктивных особенностей двигателя, схемы подключения обмоток и последовательности подаваемых на них управляющих импульсов.
В зависимости от конфигурации схемы подключения обмоток шаговые двигатели делятся на биполярные и униполярные. Биполярный двигатель имеет в каждой из двух фаз единую обмотку для обоих полюсов статора, которая для изменения направления магнитного поля должна переполюсовываться драйвером. Биполярный двигатель имеет две обмотки и, соответственно, четыре вывода. Для управления таким ШД требуется мостовой драйвер или полумостовая схема с 2-полярным питанием. При биполярном управлении одновременно работают две обмотки и крутящий момент примерно на 40% больше. На рисунке 7 представлена последовательность сигналов управления при вращении биполярного ШД.

Униполярный двигатель использует в каждой фазе одну обмотку со средним выводом и позволяет использовать более простую схему управления с одним ключом на каждую из четырех полуобмоток.
Четырех обмоточные ШД могут использоваться как в биполярной, так и в униполярной конфигурации.
При протекании тока по одной из катушек ротор стремится изменить положение так, чтобы противоположные полюса ротора и статора установились друг против друга. Для непрерывного вращения ротора катушки попеременно переключают.
На практике используются разные способы подачи питания на четыре обмотки статора. Чаще всего применяют попарное подключение с полношаговым или полушаговым режимом работы. В полношаговом режиме ротор с двумя полюсами, вращающийся в переключаемом магнитном поле двух пар катушек, может занимать четыре положения (рисунок 8).

Получить удвоенную точность позиционирования и восемь позиций позволяет полушаговый режим работы (рисунок 9). Для его реализации добавляется промежуточный шаг с одновременной запиткой всех четырех катушек.

Значительно увеличить количество промежуточных положений и точность позиционирования позволяет режим микрошага. Идея микрошага заключается в подаче на обмотки шагового двигателя вместо импульсов управления непрерывного сигнала, напоминающего по форме ступенчатую синусоиду (рисунок 10). Полный шаг в этом случае делится на маленькие микрошаги, а вращение становится более плавным. Режим микрошага позволяет получить наиболее точное позиционирование. Кроме того, в этом режиме значительно снижается присущая шаговым двигателям вибрация корпуса.

Достоинства шаговых двигателей:
- невысокая стоимость благодаря отсутствию схем контроля скорости вращения и позиционирования;
- высокая точность позиционирования;
- широкий диапазон скоростей вращения;
- простой интерфейс управления с цифровыми контроллерами;
- очень высокая надежность;
- хороший удерживающий момент.
Особенности применения шаговых двигателей:
- ШД присуще явление резонанса;
- из-за отсутствия обратной связи возможна потеря контроля положения;
- потребление энергии не уменьшается даже при работе без нагрузки;
- затруднена работа на очень высоких скоростях;
- невысокая удельная мощность;
- достаточно сложная схема управления.
Традиционные решения для управления электродвигателями
Современная прецизионная система управления электродвигателем постоянного тока включает в себя микроконтроллер для обработки данных и блок управления питанием обмоток двигателя, часто называемый драйвером. В состав драйвера входит логическая схема для преобразования кодированных посылок в цифровые управляющие сигналы, из которых в блоке Gate Driver формируются аналоговые сигналы для управления силовыми ключами на основе полевых транзисторов (FET). FET могут входить в состав драйвера или размещаться в отдельном блоке. Кроме того, в состав драйвера входят схемы защиты силовых цепей и цепи обратной связи для контроля работы двигателя.
На рисунке 11 представлены варианты блок-схем для интегрированного и предварительного драйверов. Каждое из решений имеет свои преимущества и особенности. Предварительный драйвер (Pre-Driver) имеет значительно облеченный температурный режим, позволяет выбирать внешние силовые ключи в соответствии с мощностью подключаемого двигателя. Полнофункциональный интегрированный драйвер позволяет создавать более компактные системы управления, минимизирует внешние соединения, но значительно усложняет обеспечение необходимого температурного режима.

Так, у интегрированного драйвера TI максимальная рабочая температура отдельных элементов на плате может достигать 193°С, а у предварительного драйвера этот показатель не превышает 37°С.

Одной из наиболее распространенных схем для коммутации обмоток двигателей является мост типа “H”. Название схемы связано с конфигурацией подключения, которая похожа на букву “H”. Эта электронная схема позволяет легко изменять направление тока в нагрузке и, соответственно, направление вращения ротора. Напряжение, прикладываемое к обмоткам через транзисторы моста, может быть как постоянным, так и модулированным с помощью ШИМ. H-мост предназначен, в первую очередь, для смены полярности питания двигателя – реверса (рисунок 12), но также позволяет тормозить вращение, коротко замыкая выводы обмоток (рисунок 13).

Важнейшей характеристикой силовых элементов моста, в качестве которых сегодня часто используют полевые транзисторы с изолированным затвором, является величина сопротивления открытого канала между истоком и стоком транзистора – RDSON. Значение RDSON во многом определяет тепловые характеристики блока и энергетические потери. С увеличением температуры RDSON также растет, а ток и напряжение на обмотках уменьшаются.
Использование управляющих сигналов с ШИМ позволяет уменьшить пульсации крутящего момента и обеспечить более плавное вращение ротора двигателя. В идеале частота ШИМ должна быть выше 20 кГц, чтобы избежать акустического шума. Но с увеличением частоты растут потери на транзисторах моста в процессе коммутации.
Из-за индуктивных свойств нагрузки в виде обмоток форма тока в ней не соответствует форме подаваемого напряжения ШИМ. После подачи импульса напряжения ток нарастает постепенно,а в паузах ток плавно затухает из-за возникновения в обмотках противо-ЭДС. Наклон кривой на графике тока, амплитуда и частота пульсаций влияют на рабочие характеристики двигателя (пульсации крутящего момента, шум, мощность и так далее).
Для ускоренного затухания в обмотках электродвигателей возбуждаемого эффектом противо-ЭДС тока используют диоды в обратном включении, шунтирующие переходы «сток-исток» транзисторов, либо закорачивают обмотки через переходы «сток-исток» двух транзисторов, одновременно включенных в разных плечах моста. На рисунке 13 представлены три состояния моста: рабочее, быстрого торможения (Fast Decay) и медленного торможения (Slow Decay).
А наиболее эффективным считается комбинированный режим (Mixed Decay), при котором в паузе между рабочими импульсами сначала работают диоды, шунтирующие сток-исток транзисторов, а затем включаются транзисторы в нижних плечах моста.
Решения для управления электродвигателями от TI
Среди полупроводниковых компонентов, выпускаемых компанией TI, представлен обширный ассортимент различных драйверов для управления электродвигателями постоянного тока. Все они требуют минимума внешних компонентов, позволяют создавать компактные решения для управления двигателями с рабочим напряжением до 60 В, отличаются повышенной надежностью, обеспечивают быстрое и простое проектирование систем привода электродвигателями.
Встроенные в драйверы интеллектуальные функции требуют минимальной поддержки внешнего управляющего микроконтроллера (MCU), обеспечивают расширенные коммутационные возможности для обмоток, поддерживают внешние датчики и цифровые контуры управления. Комплекс защитных функций включает ограничение напряжения питания, защиту от превышения тока и короткого замыкания, понижения напряжения и повышения рабочей температуры.
Весь модельный ряд драйверов TI разбит на три раздела: шаговые, коллекторные и бесколлекторные двигателей постоянного тока. В каждом из них на сайте компании действует удобная система подбора по целому ряду параметров. Есть отдельные драйверы, предназначенные для использования с двигателями разных типов.
Драйверы TI для шаговых двигателей
Большой раздел решений TI для управления двигателями включает драйверы для ШД (рисунок 14), которые выпускаются как со встроенными силовыми ключами на основе FET, так и в виде предварительных драйверов, предоставляющих пользователю подбор необходимых силовых ключей. Всего в модельном ряду компании более 35 драйверов для ШД.

TI предлагает широкий выбор наиболее современных решений для управления перемещением и точным позиционированием с использованием микрошаговых схем управления, обеспечивающих электродвигателей плавным перемещением в широком диапазоне напряжения и тока.
Отдельные драйверы, используя один управляющий контроллер, позволяют управлять сразу двумя двигателями, имея для этого четыре встроенных моста на основе FET. Есть драйверы с встроенными FET, например, DRV8834, которые можно подключить для управления к двум обмоткам шагового двигателя или использовать эти же выводы для управления двумя электродвигателями постоянного тока (рисунок 15).

Для более плавного перемещения ротора в драйверах для ШД используется настраиваемый механизм сглаживания импульсов тока (режимы Slow, Fast, Mixed Decay). Система расчета микрошага может быть следующих типов:
- встроенной в драйвер;
- с использованием внешнего опорного сигнала.
Не требуют внешнего контроллера для микрошагового перемещения драйверы , и . Здесь шаг перемещения и алгоритм коммутации обмоток рассчитываются схемой, встроенной в драйвер.
Драйверы TI для BDC
Для управления – коллекторными электродвигателями постоянного тока – предназначено специальное семейство драйверов , ряд представителей которого изображен на рисунке 16. Они обеспечивает полную защиту от превышения напряжения и тока, короткого замыкания и перегрева. Благодаря возможностям интерфейса управления эти драйверы обеспечивают простую и эффективную эксплуатацию двигателей. Пользователи могут с помощью одного чипа управлять одним или несколькими двигателями c рабочим напряжением 1,8…60 В.

Драйверы семейства выпускаются как с интегрированными силовыми ключами, так и как предварительные драйверы. Они требуют минимум дополнительных компонентов, обеспечивают компактность решений, сокращают время разработки и позволяют быстрее выпустить новые продукты на рынок.
Спящий режим (Sleep) позволяет минимизировать потребление энергии в режиме простоя и обеспечивает ускоренную активизацию при запуске двигателя. Для управления скоростью вращения могут использоваться внешние сигналы ШИМ или сигналы PHASE/ENABLE для выбора направления вращения и включения ключей выходного моста.
Имеющий четыре выходных моста драйвер способен управлять двумя ШД или одним ШД и двумя BDC, или же четырьмя BDC, используя при этом управляющий интерфейс SPI.
На рисунке 17 представлена функциональная схема простого драйвера для управления одним коллекторным двигателем.

Драйверы TI для BLDC
Драйверы TI для бесколлекторных двигателей, или BLDC, могут включать интегрированный силовой мост или использовать внешние силовые транзисторы. Схема формирования 3-фазных сигналов управления также может быть внешней или встроенной.
Семейство драйверов для управления бесколлекторными электродвигателями включает модели c разным принципом управления и с различным крутящим моментом. Эти драйверы, обеспечивающие разные уровни шума при управлении BDLС, идеально подойдут для использования в промышленном оборудовании, автомобильных системах и другой технике. Чтобы гарантировать надежную эксплуатацию электродвигателей, драйверы обеспечивают всеобъемлющий набор защит от превышения тока, напряжения и температуры. На рисунке 18 представлены лишь некоторые из 3-фазных драйверов для BLDC в обширном и постоянно пополняющемся модельном ряду компании TI.

Для контроля текущего положения вращающегося ротора могут использоваться внешние датчики разных типов или схема управления с определением позиции ротора по величине противо-ЭДС (Back Electromotive Force, BEMF).
Управление может выполняться с помощью ШИМ, аналоговых сигналов или через стандартные цифровые интерфейсы. Наборы настраиваемых параметров для управления вращением могут храниться во внутренней энергонезависимой памяти.
На рисунке 19 представлен работающий в широком диапазоне температур 40…125°C интеллектуальный драйвер для BLDC со встроенными силовыми ключами на полевых транзисторах, с сопротивлением открытого канала лишь 250 мОм. При диапазоне рабочих напряжений 8…28 В драйвер может обеспечивать номинальный ток 2 А и пиковый ток 3 А.

Драйвер не требует внешнего датчика для контроля положения ротора, но может использовать внешний резистор для контроля потребляемой двигателем мощности. отличается незначительным энергопотреблением, составляющим всего 3 мА, в дежурном режиме. А в модели этот показатель доведен до уровня 180 мкА.
Встроенный интерфейс I2C обеспечивает диагностику и настройку, доступ к регистрам управления работой логической схемы и хранящимся в памяти EEPROM рабочим профилям драйвера.
Расширенный комплект защитных функций обеспечивает остановку двигателя в случае превышения тока и понижения напряжения. Предусмотрено ограничение входного напряжения. Защита по превышению тока работает без использования внешнего резистора. Методы использования защиты настраиваются через специальные регистры.
Заключение
Электродвигатели находят все более широкое применение в самом различном оборудовании, совершенствуются и получают новые возможности во многом благодаря современным системам электропривода.
В ассортименте полупроводниковых компонентов производства компании Texas Instruments широко представлены микросхемы драйверов для управления всеми типами двигателей постоянного тока. На их основе компания предлагает масштабируемые в зависимости от требований по точности, мощности и функциональности решения для создания приводов, работающих в широком диапазоне токов и напряжений, обеспечивающих надежную и удобную эксплуатацию коллекторных, бесколлекторных и шаговых двигателей с полным комплексом защит по току, напряжению и температуре.
В этой статье я опишу весь цикл изготовления драйвера шагового электромотора для экспериментов. Это не конечный вариант, он рассчитан на управление одним электромотором и необходим только для исследовательских работ, схема конечного драйвера шагового двигателя будет представлена в отдельной статье.
Для того чтобы изготовить контроллер шагового двигателя, необходимо понять принцип работы самих шаговый электрических машин и чем они отличается от других типов электромоторов. А разновидностей электрических машин существует огромное множество: постоянного тока, переменного тока. Электродвигатели переменного тока делятся на синхронные и асинхронные. Описывать каждый тип электродвигателей я не стану так-как это выходит за рамки данной статьи, скажу лишь что каждый тип двигателя имеет свои преимущества и недостатки. А что же такое шаговый электродвигатель и как им управлять?
Шаговый электродвигатель — это синхронный бесщёточный электродвигатель с несколькими обмотками (обычно с четырьмя), в котором ток, подаваемый в одну из обмоток статора, вызывает фиксацию ротора. Последовательная активация обмоток двигателя вызывает дискретные угловые перемещения (шаги) ротора. Принципиальная электрическая схема шагового мотора дает представление о его устройстве.
А на этой картинке показана таблица истинности и диаграмма работы шаговика в полношаговом режиме. Существуют еще и другие режимы работы шаговых двигателей (полушаговый, микрошаговый и др.)
А как вращать ротор в другую сторону? Да очень просто, нужно изменить последовательность сигналов с ABCD на DCBA.
А как поворачивать ротор на конкретный заданный угол, например 30 градусов? У каждой модели шагового электромотора есть такой параметр как число шагов. У шаговиков которые я вытащил из матричных принтеров этот параметр 200 и 52, т.е. чтобы совершить полный оборот 360 градусов одним двигателям нужно пройти 200 шагов а другим 52. Получается чтобы повернуть ротор на угол 30 градусов, нужно пройти:
-в первом случае 30:(360:200)=16,666... (шагов) можно округлить до 17 шагов;
-во втором случае 30:(360:52)=4,33... (шага), можно округлить до 4 шагов.
Как видите есть достаточно большая погрешность, можно сделать вывод что чем больше шагов у мотора тем меньше погрешность. Погрешность можно уменьшать если использовать полушаговый или микрошаговый режим работы или механическим способом - использовать понижающий редуктор в этом случае страдает скорость движения.
Как управлять скоростью вращения ротора? Достаточно изменить длительность импульсов подаваемых на входы ABCD, чем длиннее импульсы по оси времени, тем меньше скорость вращения ротора.
Полагаю этой информации будет достаточно чтобы иметь теоретическое представление о работе шаговых электромоторов, все остальные знания можно будет получить экспериментируя.
И так перейдем к схемотехнике. Как работать с шаговым двигателем мы разобрались, осталось подключить его к Arduino и написать управляющую программу. К сожалению напрямую подключить обмотки мотора к выходам нашего микроконтроллера невозможно по одной простой причине - нехватка мощности. Любой электромотор пропускает через свои обмотки достаточно большой ток, а к микроконтроллеру можно подключить нагрузку не более 40 mA (параметры ArduinoMega 2560) . Что же делать если есть необходимость управлять нагрузкой например 10A да еще и напряжением 220В? Эту проблему можно решить если между микроконтроллером и шаговым двигателем интегрировать силовую электрическую схему, тогда можно будет управлять хоть трехфазным электромотором который открывает многотонный люк в ракетную шахту:-). В нашем случае люк в ракетную шахту открывать не нужно, нам нужно всего лишь заставить работать шаговый мотор и в этом нам поможет драйвер шагового двигателя. Можно конечно купить готовые решения, на рынке их очень много, но я буду делать свой собственный драйвер. Для этого мне понадобятся силовые ключевые полевые транзисторы Mosfet, как я уже говорил эти транзисторы идеально подходят для сопряжения Arduino с любыми нагрузками.
На рисунке ниже представлена электрическая принципиальная схема контроллера шагового двигателя.
В качестве силовых ключей я применил транзисторы IRF634B максимальное напряжение исток-сток 250В, ток стока 8,1А, этого более чем достаточно для моего случая. Со схемой более менее разобрались будем рисовать печатную плату. Рисовал в встроенном в Windows редакторе Paint, скажу это не самая лучшая затея, в следующий раз буду использовать какой-нибудь специализированный и простой редактор печатных плат. Ниже представлен рисунок готовой печатной платы.
Далее это изображение в зеркальном отражении распечатываем на бумаге при помощи лазерного принтера. Яркость печати лучше всего сделать максимальной, а бумагу нужно использовать не обычную офисную а глянцевую, подойдут обычные глянцевые журналы. Берем лист и печатаем поверх имеющегося изображения. Далее получившуюся картинку прикладываем к заранее подготовленному куску фольгированного стеклотекстолита и хорошенько проглаживаем утюгом в течении 20 минут. Утюг нужно нагреть до максимальной температуры.
Как подготовить текстолит? Во первых его нужно отрезать по размеру изображения печатной платы (при помощи ножниц по металлу или ножовкой по металлу), во вторых зашкурить края мелкой наждачной бумагой, чтобы не осталось заусенцев. Также необходимо пройтись наждачкой по поверхности фольги, снять окислы, фольга приобретет ровный красноватый оттенок. Далее поверхность обработанную наждачной бумагой нужно протереть ваткой смоченной в растворитель (используйте 646 растворитель он меньше воняет).
После прогрева утюгом, тонер с бумаги запекается на поверхность фольгированного стеклотекстолита в виде изображения контактных дорожек. После этой операции плату с бумагой необходимо остудить до комнатной температуры и положить в ванночку с водой примерно на 30 минут. За это время бумага раскиснет и ее нужно аккуратно скатать подушечками пальцев с поверхности текстолита. На поверхности останутся ровные черные следы в виде контактных дорожек. Если у вас не получилось перенести изображение с бумаги и у вас есть огрехи, тогда следует смыть тонер с поверхности текстолита растворителем и повторить все заново. У меня все получилось с первого раза.
После получения качественного изображения дорожек, необходимо вытравить лишнюю медь, для этого нам понадобится травильный раствор который мы приготовим сами. Раньше для травления печатных плат я использовал медный купорос и обычную поваренную соль в соотношении на 0,5 литра горячей воды по 2 столовые ложки с горкой медного купороса и поваренной соли. Все это тщательно размешивалось в воде и раствор готов. Но в этот раз попробовал иной рецепт, очень дешевый и доступный.
Рекомендуемый способ приготовления травильного раствора:
В 100 мл аптечной 3% перекиси водорода растворяется 30 г лимонной кислоты и 2 чайные ложки поваренной соли. Этого раствора должно хватить для травления площади 100 см2. Соль при подготовке раствора можно не жалеть. Так как она играет роль катализатора и в процессе травления практически не расходуется.
После приготовления раствора, печатную плату необходимо опустить в емкость с раствором и наблюдать за процессом травления, тут главное не передержать. Раствор съест непокрытую тонером поверхность меди, как только это произойдет плату необходимо достать и промыть холодной водой, далее ее нужно просушить и снять с поверхности дорожек тонер при помощи ватки и растворителя. Если в вашей плате предусмотрены отверстия для крепления радиодеталей или крепежа, самое время просверлить их. Я опустил эту операцию по причине того что это всего лишь макетный драйвер шагового двигателя, предназначенный для освоения новых для меня технологий.
Приступаем к лужению дорожек. Это необходимо сделать чтобы облегчить себе работу при пайке. Раньше я лудил при помощи припоя и канифоли, но скажу это "грязный" способ. От канифоли много дыма и шлака на плате который нужно будет смывать растворителем. Я применил другой способ, лужение глицерином. Глицерин продается в аптеках и стоит копейки. Поверхность платы необходимо протереть ваткой смоченной в глицерине и наносить припой паяльником точными мазками. Поверхность дорожек покрывается тонким слоем припоя и остается чистой, лишний глицерин можно удалить ваткой или промыть плату в воде с мылом. К сожалению у меня нет фотографии полученного результата, после лужения, но получившееся качество впечатляет.
Далее необходимо припаять все радиодетали на плату, для пайки SMD компонентов я использовал пинцет. В качестве флюса использовал глицерин. Получилось очень даже аккуратно.
Результат налицо. Конечно после изготовления плата выглядела лучше, на фото она уже после многочисленных экспериментов (для этого она и создавалась).

Итак наш драйвер шагового двигателя готов! Теперь переходим к самому интересному к практическим экспериментам. Припаиваем все провода подключаем источник питания и пишем управляющую программу для Arduino.
Среда разработки Arduino богата на различные библиотеки, для работы с шаговым двигателем предусмотрена специальная библиотека Stepper.h, ее мы и будем использовать. Как пользоваться средой разработки Arduino и описывать синтаксис языка программирования я не стану, эту информацию вы можете посмотреть на сайте http://www.arduino.cc/ , там же описание всех библиотек с примерами в том числе и описание Stepper.h.

Листинг программы:
/*
* Тестовая программа для шаговика
*/
#include
#define STEPS 200
Stepper stepper(STEPS, 31, 33, 35, 37);
void setup()
{
stepper.setSpeed(50);
}
void loop()
{
stepper.step(200);
delay(1000);
}
Данная управляющая программа заставляет делать один полный оборот вала шагового двигателя, после перерыва длительностью в одну секунду, повторяется до бесконечности. Можно поэкспериментировать со скоростью вращения, направлением вращения а также углами поворотов.
Простой контроллер Шагового Двигателя из компьютерного барахла стоимостью ~150 рублей.
Началось мое станкостроение со случайной ссылки на немецкий станок за 2000DM, который на мой взгляд выглядел по детски, однако мог выполнять довольно много занятных функций. В тот момент, меня заинтересовала возможность рисовать платы (это было еще до появления в моей жизни ЛУТ).
В результате протяженных поисков в сети было найдено несколько сайтов посвященных этой проблеме, однако русскоязычных среди них не было ни одного (это было примерно 3 года назад). В общем, в конце концов, я нашел два принтера CM6337 (кстати их выпускал Орловский завод УВМ), откуда и выдрал униполярные шаговые двигатели (Dynasyn 4SHG-023F 39S, аналог ДШИ200-1-1). Параллельно с доставанием принтеров заказал и микросхемы ULN2803A(с буквой А – DIP корпус). Все собрал, запустил. Что получил, а получил дико греющиеся микросхемы ключей, и с трудом вращающийся двигатель. Так как по схеме из Голландии для увеличения тока ключи соединены попарно, то максимальный отдаваемый ток не превышал 1А, в то время как двигателю надо было 2А (кто ж знал что я найду такие прожорливые, как мне тогда показалось, двигатели J). Кроме того, данные ключи построены по биполярной технологии, для тех кто не в курсе, падение напряжения может быть до 2В (если питание от 5, то фактически половина падает на сопротивлении перехода).
В принципе, для опытов с двигателями от 5” дисководов очень неплохой вариант, можно сделать например плоттер, однако что то более тяжелое чем карандаш (например дремель) ими вряд ли можно тягать.
Решил собрать свою собственную схему из дискретных элементов, благо в одном из принтеров оказалась нетронутой электроника, и я взял оттуда транзисторы КТ829 (Ток до 8А, напряжение до 100В)… Была собрана такая схема…
Рис.1 – Схема драйвера для 4х фазного униполярного двигателя.
Сейчас объясню принцип. При подаче логической “1” на один из выводов (на остальных “0”), например на D0, транзистор открывается и ток течет через одну из катушек двигателя, при этом двигатель отрабатывает один шаг. Далее единица подается на следующий вывод D1, а на D0 единица сбрасывается в ноль. Двигатель отрабатывает сладующий шаг. Если подавать ток сразу в две соседние катушки то реализуется режим полушагов (для моих двигателей с углом поворота 1,8’ получается 400 шагов на оборот).
К общему выводу подсоединяются отводы от середины катушек двигателя (их два если проводов шесть). Очень хорошо теория шаговых двигателей описана тут — Шаговые двигатели. Управление шаговым двигателем., тут же приведена схема контроллера ШД на микроконтроллере AVR фирмы Atmel. Честно говоря, мне показалось похоже на забивание гвоздей часами, однако в ней реализована очень хорошая функция как ШИМ регулирование тока обмоток.
Поняв принцип, несложно написать программу управляющую двигателем через LPT порт. Зачем в этой схеме диоды, а за тем, что нагрузка у нас индуктивная, при возникновении ЭДС самоиндукции она разряжается через диод, при этом исключается пробой транзистора, а следовательно и вывод его из строя. Еще одна деталь схемы – регистр RG (я использовал 555ИР33), используется как шинный формирователь, поскольку ток отдаваемый, например LPT портом мал – можно его элементарно спалить, а следовательно, есть возможность спалить весь компьютер.
Схема примитивна, и собрать такое можно минут за 15-20, если есть все детали. Однако у такого принципа управления есть недостаток – так как формирование задержек при задании скорости вращения задается программой относительно внутренних часов компьютера то работать в многозадачной системе (Win) это все не будет! Будут просто теряться шаги (может быть в Windows и есть таймер, но я не в курсе). Второй недостаток – это нестабилизированный ток обмоток, максимальную мощность из двигателя не выжать. Однако по простоте и надежности этот способ меня устраивает, тем более что для того, что бы не рисковать своим Атлоном 2ГГц, я собрал из барахла 486 тарантас, и кроме ДОСа там, в принципе мало, что можно поставить нормальное.
Описанная выше схема работала и в принципе неплоха, но я решил, что можно несколько переделать схему. Применить MOSFETJ). транзисторы (полевые), выигрыш в том, что можно коммутировать огромные токи (до 75 – 100А), при солидных для шаговых двигателей напряжениях (до 30В), и при этом детали схемы практически не греются, ну если не считать предельных значений (хотел бы я видеть тот который съест ток 100А
Как всегда в России возник вопрос, где взять детали. У меня возникла идея – извлечь транзисторы из горелых материнских плат, благо, например Атлоны кушают порядочно и транзисторы там стоят огого. Дал объявление в ФИДО, и получил предложение забрать 3 мат. платы за 100 рублей. Прикинув что в магазине за эти деньги можно от силы купить 3 транзистора, забрал, расковырял и о чудо, хотя они все и были дохлыми, ни один транзистор в цепи питания процессора не пострадал. Так я получил пару десятков полевых транзисторов за сто рублей. Схема, которая получилась в результате, представлена ниже.

Рис. 2 – Тоже на полевых транзисторах
Отличий в этой схеме немного, в частности была применена микросхема нормального буфера 75LS245 (выпаяна над газовой плитой из 286 материнской платы J). Диоды можно поставить любые, главное, что бы их максимальное напряжение не было меньше максимального напряжения питания, а предельный ток не меньше тока питания одной фазы. Я поставил диоды КД213A, это 10А и 200В. Возможно это излишне для моих 2х амперных двигателей, однако покупать детали не было смысла, да и запас по току думается лишним не будет. Резисторы служат для ограничения тока перезарядки емкости затворов.
Ниже приводится печатная плата контроллера построенного по такой схеме.

Рис. 3 – Печатная плата.
Печатная плата разведена для поверхностного монтажа на одностороннем текстолите (лень мне что то дырочки сверлить сталоJ). Микросхемы в DIP корпусах паяются с подогнутыми ножками, резисторы SMD с тех же материнок. Файл с разводкой в Sprint-Layout 4.0 прилагается. Можно было бы запаять на плату и разъемы, но лень как говорится — двигатель прогресса, да и при отладке железа удобнее было запаять провода подлиннее.
Еще необходимо отметить, что схема снабжена тремя концевиками, на плате справа снизу шесть контактов вертикально, радом с ними посадочные места под три резистора, каждый соединяет один вывод выключателей с +5В. Схема концевиков:

Рис. 4 – Схема концевиков.
Вот так это выглядело у меня в процессе наладки системы:
В результате на представленный контроллер я потратил не более 150 рублей: 100 рублей за материнские платы (при желании можно вообще бесплатно достать) + кусок текстолита, припой и банка хлорного железа в сумме тянут на ~50 рублей, причем хлорного железа останется потом еще много. Думаю считать провода и разъемы смысла не имеет. (Кстати разъем питания отпилен от старого винчестера.)
Так как практически все детали сделаны в домашних условиях, с помощью дрели, напильника, ножовки, рук и такой то матери, то зазоры конечно гигантские, однако модифицировать отдельные узлы в процессе эксплуатации и опытов проще, чем изначально делать все точно.
Если бы на Орловских заводах проточить отдельные детали не стоило бы так дорого, то мне бы конечно проще было бы вычертить все детали в CAD’е, со всеми квалитетами и шероховатостями и отдать на съедение рабочим. Однако знакомых токарей нет… Да и руками как то знаете ли интереснее…
P.S. Хочу высказать свое мнение по поводу негативного отношения автора сайта к советским и Российским двигателям. Советские двигатели ДШИ, вполне себе даже ничего, даже маломощный ДШИ200-1-1. Так что если вам удалось откопать за “пиво” такое добро не спешите выкидывать их, они еще поработают… проверено… Но если же покупать, и разность в стоимости не велика, лучше все таки брать иностранные, поскольку точность у них конечно будет выше.
P.P.S. Е: Если что то я написал не правильно пишите, исправим, но … РАБОТАЕТ…
Для работы практически всех электрических приборов, необходимы специальные приводные механизмы. Предлагаем рассмотреть, что такое шаговый двигатель, его конструкцию, принцип работы и схемы подключения.
Что такое шаговый двигатель?
Шаговый двигатель представляет собой электрическую машину, предназначенную для преобразования электрической энергии сети в механическую энергию. Конструктивно состоит из обмоток статора и магнитомягкого или магнитотвердого ротора. Отличительной особенностью шагового двигателя является дискретное вращение, при котором заданному числу импульсов соответствует определенное число совершаемых шагов. Наибольшее применение такие устройства получили в станках с ЧПУ, робототехнике, устройствах хранения и считывания информации.
В отличии от других типов машин шаговый двигатель совершает вращение не непрерывно, а шагами, от чего и происходит название устройства. Каждый такой шаг составляет лишь часть от его полного оборота. Количество необходимых шагов для полного вращения вала будет отличаться, в зависимости от схемы соединения, марки двигателя и способа управления.
Преимущества и недостатки шагового электродвигателя
К преимуществам эксплуатации шагового двигателя можно отнести:
- В шаговых электродвигателях угол поворота соответствует числу поданных электрических сигналов, при этом, после остановки вращения сохраняется полный момент и фиксация;
- Точное позиционирование – обеспечивает 3 – 5% от установленного шага, которая не накапливается от шага к шагу;
- Обеспечивает высокую скорость старта, реверса, остановки;
- Отличается высокой надежностью за счет отсутствия трущихся компонентов для токосъема, в отличии от коллекторных двигателей;
- Для позиционирования шаговому двигателю не требуется обратной связи;
- Может выдавать низкие обороты для непосредственно подведенной нагрузки без каких-либо редукторов;
- Сравнительно меньшая стоимость относительно тех же ;
- Обеспечивается широкий диапазон управления скоростью оборотов вала за счет изменения частоты электрических импульсов.
К недостаткам применения шагового двигателя относятся:
- Может возникать резонансный эффект и проскальзывание шагового агрегата;
- Существует вероятность утраты контроля из-за отсутствия обратной связи;
- Количество расходуемой электроэнергии не зависит от наличия или отсутствия нагрузки;
- Сложности управления из-за особенности схемы
Устройство и принцип работы
Рис. 1. Принцип действия шагового двигателяНа рисунке 1 изображены 4 обмотки, которые относятся к статору двигателя, а их расположение устроено так, что они находятся под углом 90º относительно друг друга. Из чего следует, что такая машина характеризуется размером шага в 90º.
В момент подачи напряжения U1 в первую обмотку происходит перемещение ротора на те же 90º. В случае поочередной подачи напряжения U2, U3, U4 в соответствующие обмотки, вал продолжит вращение до завершения полного круга. После чего цикл повторяется снова. Для изменения направления вращения достаточно изменить очередность подачи импульсов в соответствующие обмотки.
Типы шаговых двигателей
Для обеспечения различных параметров работы важна как величина шага, на который будет смещаться вал, так и момент, прилагаемый для перемещения. Вариации данных параметров достигаются за счет конструкции самого ротора, способа подключения и конструкции обмоток.
По конструкции ротора
Вращаемый элемент обеспечивает магнитное взаимодействие с электромагнитным полем статора. Поэтому его конструкция и технические особенности напрямую определяют режим работы и параметры вращения шагового агрегата. Чтобы на практике определить тип шагового мотора, при обесточенной сети необходимо провернуть вал, если ощущаете сопротивление, то это свидетельствует о наличии магнита, в противном случае, это конструкция без магнитного сопротивления.
Реактивный
Реактивный шаговый двигатель не оснащается магнитом на роторе, а выполняется из магнитомягких сплавов, как правило, его набирают из пластин для уменьшения потерь на индукцию. Конструкция в поперечном разрезе напоминает шестерню с зубцами. Полюса статорных обмоток запитываются противоположными парами и создают магнитную силу для перемещения ротора, который двигается от попеременного протекания электрического тока в обмоточных парах.

Весомым плюсом такой конструкции шагового привода является отсутствие стопорящего момента, образуемого полем по отношению к арматуре. По факту это тот же , в котором поворот ротора идет в соответствии с полем статора. Недостатком является снижение величины вращающего момента. Шаг для реактивного двигателя колеблется от 5 до 15°.
С постоянными магнитами
В этом случае подвижный элемент шагового двигателя собирается из постоянного магнита, в котором может быть два и большее количеством полюсов. Вращение ротора обеспечивается притяжением или отталкиванием магнитных полюсов электрическим полем при подаче напряжения в соответствующие обмотки. Для этой конструкции угловой шаг составляет 45-90°.

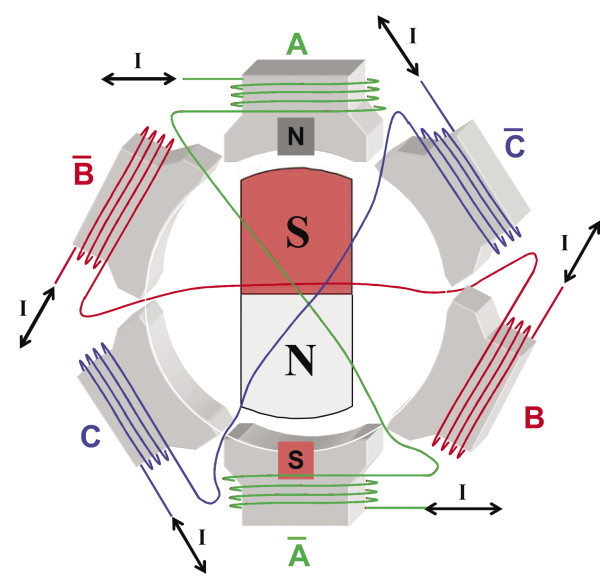
Гибридные
Был разработан с целью объединения лучших качеств двух предыдущих моделей, за счет чего агрегат обладает меньшим углом и шагом. Его ротор выполнен в виде цилиндрического постоянного магнита, который намагничен по продольной оси. Конструктивно это выглядит как два круглых полюса, на поверхности которых расположены зубцы ротора из магнитомягкого материала. Такое решение позволило обеспечить отличный удерживающий и крутящий момент.

Преимущества гибридного шагового двигателя заключатся в его высокой точности, плавности и скорости перемещения, малым шагом – от 0,9 до 5°. Их применяют для высококлассных станков ЧПУ, компьютерных и офисных приборах и современной робототехнике. Единственным недостатком считается относительно высокая стоимость.
Для примера разберем вариант гибридных ШД на 200 шагов позиционирования вала. Соответственно каждый из цилиндров будет иметь по 50 зубцов, один из них является положительным полюсом, второй отрицательным. При этом каждый положительный зубец расположен напротив паза в отрицательном цилиндре и наоборот. Конструктивно это выглядит так:

Из-за чего на валу шагового двигателя получается 100 перемежающихся полюсов с отличной полярностью. Статор также имеет зубцы, как показано на рисунке 6 ниже, кроме промежутков между его компонентами.
 Рис. 6. Принцип работы гибридного ШД
Рис. 6. Принцип работы гибридного ШД
За счет такой конструкции можно достичь смещения того же южного полюса относительно статора в 50 различных позиций. За счет отличия положения в полупозиции между северным и южным полюсом достигается возможность перемещения в 100 позициях, а смещение фаз на четверть деления предоставляет возможность увеличить количество шагов за счет последовательного возбуждения еще вдвое, то есть до 200 шагов углового вала за 1 оборот.
Обратите внимание на рисунок 6, принцип работы такого шагового двигателя заключается в том, что при попарной подаче тока в противоположные обмотки происходит подтягивание разноименных полюсов ротора, расположенных за зубьями статора и отталкивание одноименных, идущих перед ними по ходу вращения.
По виду обмоток
На практике шаговый двигатель представляет собой многофазный мотор. Плавность работы в котором напрямую зависит от количества обмоток – чем их больше, тем плавне происходит вращение, но и выше стоимость. При этом крутящий момент от числа фаз не увеличивается, хотя для нормальной работы их минимальное число на статоре электродвигателя должно составлять хотя бы две. Количество фаз не определяет числа обмоток, так двухфазный шаговый двигатель может иметь четыре и более обмотки.
Униполярный
Униполярный шаговый двигатель отличается тем, что в схеме подключения обмотки имеется ответвление от средней точки. Благодаря чему легко меняются магнитные полюса. Недостатком такой конструкции является использование только одной половины доступных витков, из-за чего достигается меньший вращающий момент. Поэтому они отличаются большими габаритами.

Для использования всей мощности катушки средний вывод оставляют не подключенным. Рассмотрите конструкции униполярных агрегатов, они могут содержать 5 и 6 выводов. Их количество будет зависеть от того, выводится срединный провод отдельно от каждой обмотки двигателя или они соединяются вместе.

Биполярный
Биполярный шаговый двигатель подключается к контроллеру через 4 вывода. При этом обмотки могут соединяться внутри как последовательно, так и параллельно. Рассмотрите пример его работы на рисунке.

В конструктивной схеме такого двигателя вы видите с одной обмоткой возбуждения в каждой фазе. Из-за этого смена направления тока требует использовать в электронной схеме специальные драйверы (электронные чипы, предназначенные для управления). Добиться подобного эффекта можно при помощи включения Н-моста. В сравнении с предыдущим, биполярное устройство обеспечивает тот же момент при гораздо меньших габаритах.
Подключение шагового двигателя
Чтобы запитать обмотки, потребуется устройство способное выдать управляющий импульс или серию импульсов в определенной последовательности. В качестве таких блоков выступают полупроводниковые приборы для подключения шагового двигателя, микропроцессорные драйвера. В которых имеется набор выходных клемм, каждая из них определяет способ питания и режим работы.
В зависимости от схемы подключения должны применяться те или другие выводы шагового агрегата. При различных вариантах подведения тех или иных клемм к выходному сигналу постоянного тока получается определенная скорость вращения, шаг или микрошаг линейного перемещения в плоскости. Так как для одних задач нужна низкая частота, а для других высокая, один и тот же двигатель может задавать параметр за счет драйвера.
Типичные схемы подключения ШД
В зависимости того, какое количество выводов представлено на конкретном шаговом двигателе: 4, 6 или 8 выводов, будет отличаться и возможность использования той или иной схемы их подключения Посмотрите на рисунки, здесь показаны типичные варианты подключения шагового механизма:
 Схемы подключения различных типов шаговых двигателей
Схемы подключения различных типов шаговых двигателей
При условии запитки основных полюсов шаговой машины от одного и того же драйвера, по данным схемам можно отметить следующие отличительные особенности работы:
- Выводы однозначно подводятся к соответствующим клеммам устройства. При последовательном соединении обмоток увеличивает индуктивность обмоток, но понижает ток.
- Обеспечивает паспортное значение электрических характеристик. При параллельной схеме увеличивается ток и снижается индуктивность.
- При подключении по одной фазе на обмотку снижется момент на низких оборотах и уменьшает величину токов.
- При подключении осуществляет все электрические и динамические характеристики согласно паспорта, номинальный токи. Значительно упрощается схема управления.
- Выдает куда больший момент и применяется для больших частот вращения;
- Как и предыдущая предназначена для увеличения момента, но применяется для низких частот вращения.
Управление шаговым двигателем
Выполнение операций шаговым агрегатом может осуществляться несколькими методами. Каждый из которых отличается способом подачи сигналов на пары полюсов. Всего выделяют тир метода активации обмоток.
Волновой – в таком режиме происходит возбуждение только одной обмотке, к которой и притягиваются роторные полюса. При этом шаговый двигатель не способен вытягивать большую нагрузки, так как выдает лишь половину момента.

Полношаговый — в таком режиме происходит одновременная коммутация фаз, то есть, возбуждаются сразу обе. Из-за чего обеспечивается максимальный момент, в случае параллельного соединения или последовательного включения обмоток будет создаваться максимальное напряжение или ток.

Полушаговый – представляет собой комбинацию двух предыдущих методов коммутации обмоток. Во время реализации которого в шаговом двигателе происходит поочередная подача напряжения сначала в одну катушку, а затем сразу в две. Благодаря чему обеспечивается лучшая фиксация на максимальных скоростях и большее количество шагов.

Для более мягкого управления и преодоления инерции ротора используется микрошаговое управление, когда синусоида сигнала осуществляется микроступенчатыми импульсами. За счет чего силы взаимодействия магнитных цепей в шаговом двигателе получают более плавное изменение и, как следствие, перемещение ротора между полюсами. Позволяет в значительной степени снизить рывки шагового двигателя.
Без контроллера
Для управления бесколлекторными двигателями применяется система Н-моста. Который позволяет переключать полярность для реверса шагового двигателя. Может выполняться на транзисторах или микросхемах, которые создают логическую цепочку для перемещения ключей.

Как видите, от источника питания V напряжение подается на мост. При попарном включении контактов S1 – S4 или S3 – S2 будет происходить движение тока через обмотки двигателя. Что и обусловит вращение в ту или иную сторону.
С контроллером
Устройство контроллера позволяет осуществлять управление шаговым двигателем в различных режимах. В основе контроллера лежит электронный блок, формирующий группы сигналов и их последовательность, посылаемых на катушки статора. Для предотвращения возможности его повреждения в случае короткого замыкания или другой аварийной ситуации на самом двигателе каждый вывод защищается диодом, который не пропусти импульс в обратную сторону.
 Подключение через контроллер однополярного шагового двигателя
Подключение через контроллер однополярного шагового двигателя
Популярные схемы управления ШД
 Схема управления от контроллера с дифференциальным выходом
Схема управления от контроллера с дифференциальным выходом
Является одним из наиболее помехозащищенных способов работы. При этом прямой и инверсный сигнал напрямую подключается к соответствующим полюсам. В такой схемы должно применяться экранирование сигнального проводника. Прекрасно подходит для нагрузки с низкой мощностью.
 Схема управления от контроллера с выходом типа «открытый коллектор»
Схема управления от контроллера с выходом типа «открытый коллектор»
В данной схеме происходит объединение положительных вводов контроллера, которые подключаются к положительному полюсу. В случае питания выше 9В требуется включение в схему специального резистора для ограничения тока. Позволяет задавать необходимое количество шагов со строго установленной скоростью, определить ускорение и т.д.
Простейший драйвер шагового двигателя своими руками
Чтобы собрать схему драйвера в домашних условиях могут пригодиться некоторые элементы от старых принтеров, компьютеров и другой техники. Вам понадобятся транзисторы, диоды, резисторы (R) и микросхема (RG).

Для построения программы руководствуйтесь следующим принципом: при подаче на один из выводов D логической единицы (остальные сигнализируют ноль) происходит открытие транзистора и сигнал проходит к катушке двигателя. Таким образом, выполняется один шаг.
На основе схемы составляется печатная плата, которую можно попытаться изготовить самостоятельно или сделать под заказ. После чего на плате впаиваются соответствующие детали. Устройство способно управлять шаговым устройством от домашнего компьютера за счет подключения к обычному USB порту.






